Idea: Stop training when the validation error starts going up.
In practice, this is implemented by checkpointing (saving) the neural network weights every few iterations/epochs during training.
We choose the checkpoint with the best validation error to actually use. (And if there is a tie, use the earlier checkpoint)
Why does Early Stopping Work?
Weights start off small, so it takes time for them to grow large.
Therefore, stopping early has a similar effect to weight decay.
If you’re using sigmoid units, and the weights start out small, then the inputs to the activation functions take only a small range of values.
The neural network starts out approximately linear, and gradually becomes non-linear (and thus more powerful)
Ensembles
If a loss function is convex (with respect to the predictions), you have a bunch of predictions for an input, and you don’t know which one is best, you are always better off averaging them!
for \(\lambda_i \ge 0\) and \(\sum_i \lambda_i = 1\)
Idea: Build multiple candidate models, and average the predictions on the test data.
This set of models is called an ensemble.
Examples of Ensembles
Train neural networks starting from different random initialization (might not give enough diversity)
Train different network on different subset of the training data (called bagging)
Train networks with different architectures, hyperparameters, or use other machine learning models
Ensembles can improve generalization substantially.
However, ensembles are expensive.
Stochastic Regularization
For a network to overfit, its computations need to be really precise.
This suggests regularizing them by injecting noise into the computations, a strategy known as stochastic regularization.
One example is dropout: in each training iteration, random choose a portion of activations to set to 0.
Stochastic Regularization II
The probability \(p\) that an activation is set to 0 is a hyperparameter.
Dropout
Can be seen as training an ensemble of 2D different architectures with shared weights (where D is the number of units)
Avoids co-adaptation
Dropout at Test Time
Don’t do dropout at test time (why not?)
Multiply the weights by \(1-p\) (why?)
Summary of “Bag of Tricks”
Data Augmentation
Reducing the number of parameters
Weight decay
Early stopping
Ensembles
Stochastic regularization (e.g. dropout)
Diagnosing Issues using Learning Curves
Why does the Training Curve look like his?
The learning rate is too high
The learning rate is too low
The number of iterations is too low
The weights are all initialized to zero
Why does the Training Curve look like this?
The batch size is too small
Batch normalization was used
The number of parameters is too large
The learning rate is too small
Why does the Training Curve look like this?
The network probably has too few parameters
The network probably has too many parameters
The learning rate is probably too small
If weight decay is used, the lambda parameter is probably too large.
Either (1) or (4) could be true
Why does the Training Curve look like this?
Evidence of overfitting
Evidence of underfitting
Too much momentum
The weights were all initialized to 0
Bias-Variance Tradeoff
Expected Test Error for Regression
Training set \(D = \{(x_1, y_1), ..., (x_n, y_n)\}\) drawn i.i.d. from distribution \(P(X,Y)\). Let’s write this as \(D \sim P^n\).
Assume for simplicity this is a regression problem with \(y \in \mathbb{R}\) and \(L_2\) loss.
What is the expected test error for a function \(h_D(x)=y\) trained on the training set \(D \sim P^n\), assuming a learning algorithm \(\mathcal{A}\)? It is:
Method: RMSProp (cont’d)
The following update is applied to each coordinate j independently: \[\begin{align*}
\mathbb{E}_{D \sim P^n, (x,y) \sim P} \left[ (h_D(x) - y)^2 \right]
\end{align*}\]
The expectation is taken with respect to possible training sets \(D \sim P^n\) and the test distribution P. Let’s write the expectation as \(\mathbb{E}_{D,x,y}\) for notational simplicity.
Note that this is the expected test error not the empirical test error that we report after training. How are they different?
Decomposing the Expected Test Error
Let’s start by adding and subtracting the same quantity \[\begin{multline*}
\mathbb{E}_{D,x,y} \left[ \left(h_D(x) - y\right)^2 \right] \\
= \mathbb{E}_{D,x,y} \left[ \left(h_D(x) - \hat{h}(x) + \hat{h}(x) - y\right)^2 \right]
\end{multline*}\]
\(\hat{h}(x) = \mathbb{E}_{D \sim P^n}[h_D(x)]\) is the expected regressor over possible training sets, given the learning algorithm \(\mathcal{A}\).
Decomposing the Expected Test Error
After some algebraic manipulation (proof), we can show that:
\(\hat{y}(x) = \mathbb{E}_{y|x}[y]\) is the expected label given \(x\). Labels might not be deterministic given x.
Differential Privacy
What is Differential Privacy (DP)?
Definition: A mathematical framework for quantifying and controlling the privacy risks in data analysis.
Goal: Ensures that the inclusion or exclusion of a single data point does not significantly affect the output of a model.
Why?
Protects sensitive information in training data.
Prevents models from overfitting to individual samples.
Definition of Differential Privacy
Intuitive definition An algorithm is differentially private if the addition or removal of a single data point does not significantly affect the output.
Formal definition: An algorithm is \(\varepsilon\)-differentially private if for all datasets ( D ) and ( D’ ) differing in one element, and for all outputs ( S ):
Applying DP in Neural Networks: Introduce noise to gradients during training.
Mechanisms (DP-SGD)
Clips gradients to a maximum norm.
Adds calibrated Gaussian noise to the gradients.
Example – Healthcare Dataset
Scenario: Predicting Disease Risk
Task: A neural network is trained to predict the risk of a disease based on patient health records.
Data: Sensitive medical information such as diagnosis history.
Example – Healthcare Dataset II
What Happens Without DP?
Outcome: The model performs well but memorizes some specific details from training samples.
Risk: If an attacker queries the model with information about a specific individual, the model could reveal their presence in the training set by giving a higher probability for that individual, leaking private information.
Example – Healthcare Dataset III
With DP:
Outcome: The model’s predictions are less influenced by any single training sample. The addition of noise prevents overfitting to specific patient data.
Benefit: The model’s output is less likely to change noticeably even if a single patient’s record is added or removed, protecting patient privacy.
Example – E-Commerce Recommendations
Scenario: Personalized Product Recommendations
Task: A deep learning model recommends products based on customer browsing history and previous purchases.
Data: Includes user shopping patterns, age, and location.
Example – E-Commerce Recommendations II
Without DP:
Outcome: The model gives highly personalized recommendations.
Risk: An attacker could infer specific details about individual users (e.g., based on specific product recommendations or similarities to other users’ behaviors), leading to a privacy breach.
Example – E-Commerce Recommendations III
With DP:
Outcome: Slightly less personalized recommendations but better generalization to unseen users.
Benefit: An attacker would have a much harder time inferring personal details from the recommendations, thanks to the noise added during model training.
Wrap Up
Summary
Gradient Descent and SGD
Learning Rate
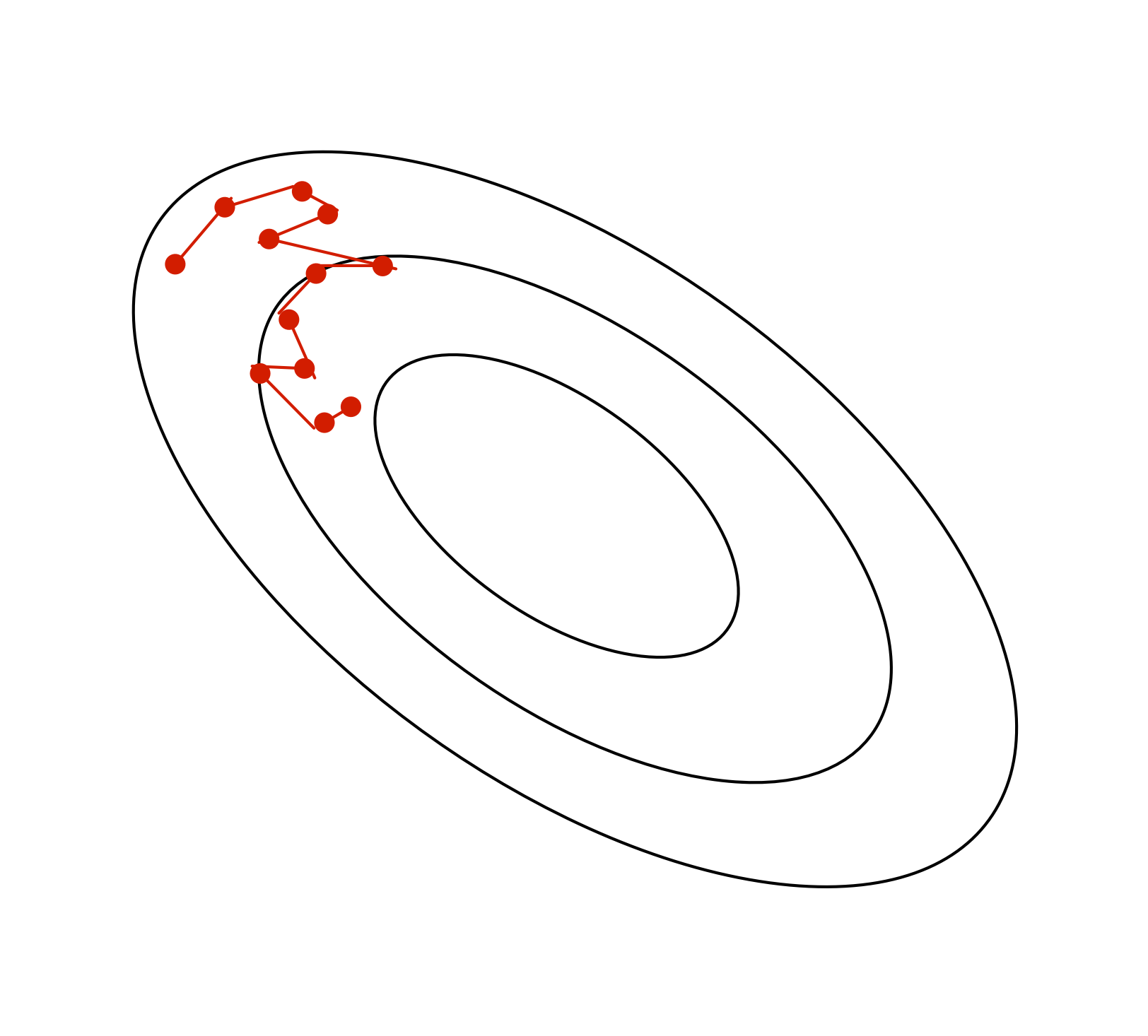
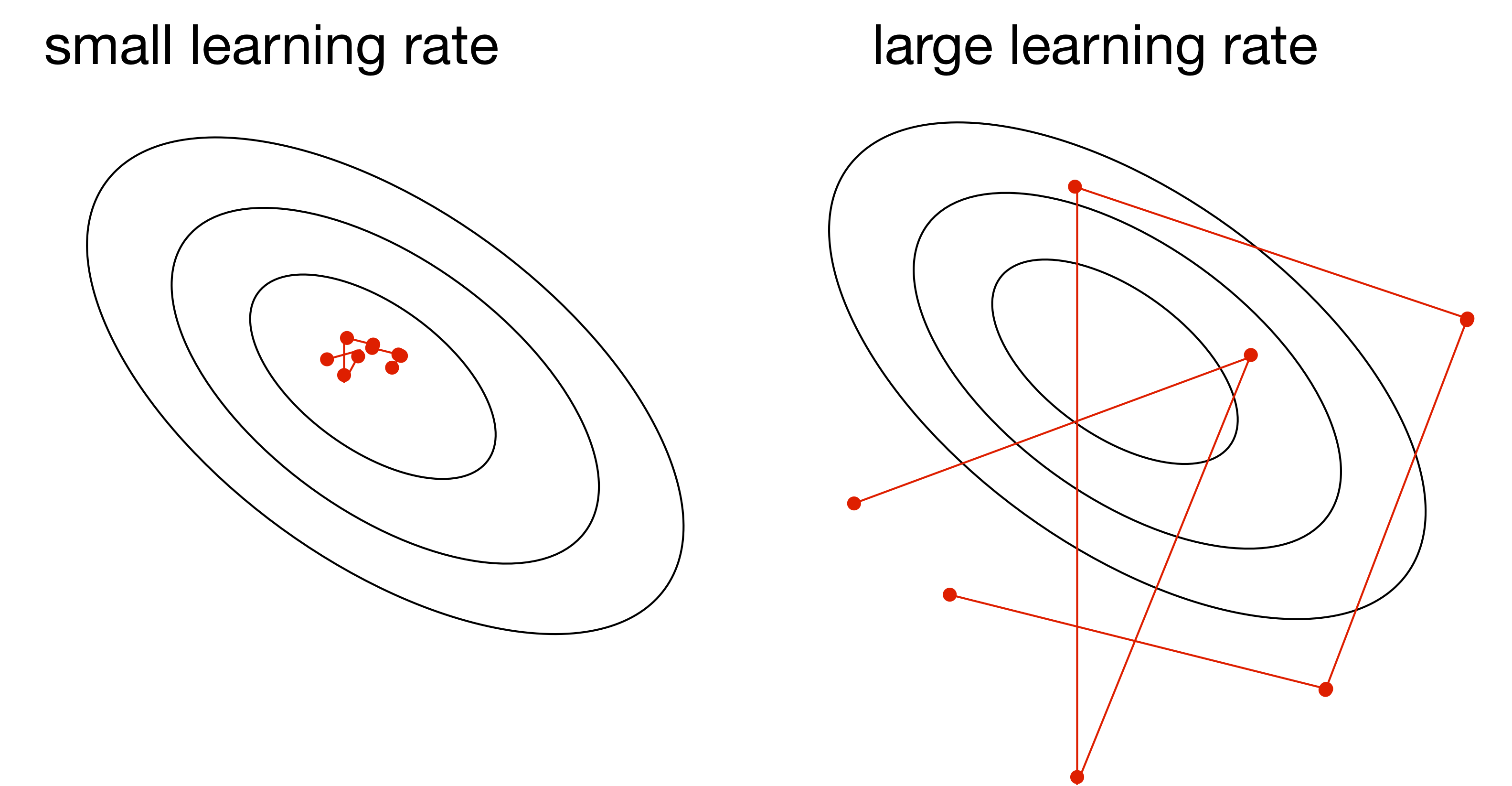
The learning rate \(\alpha\) is a hyperparameter we need to tune. Here are the things that can go wrong in batch mode:
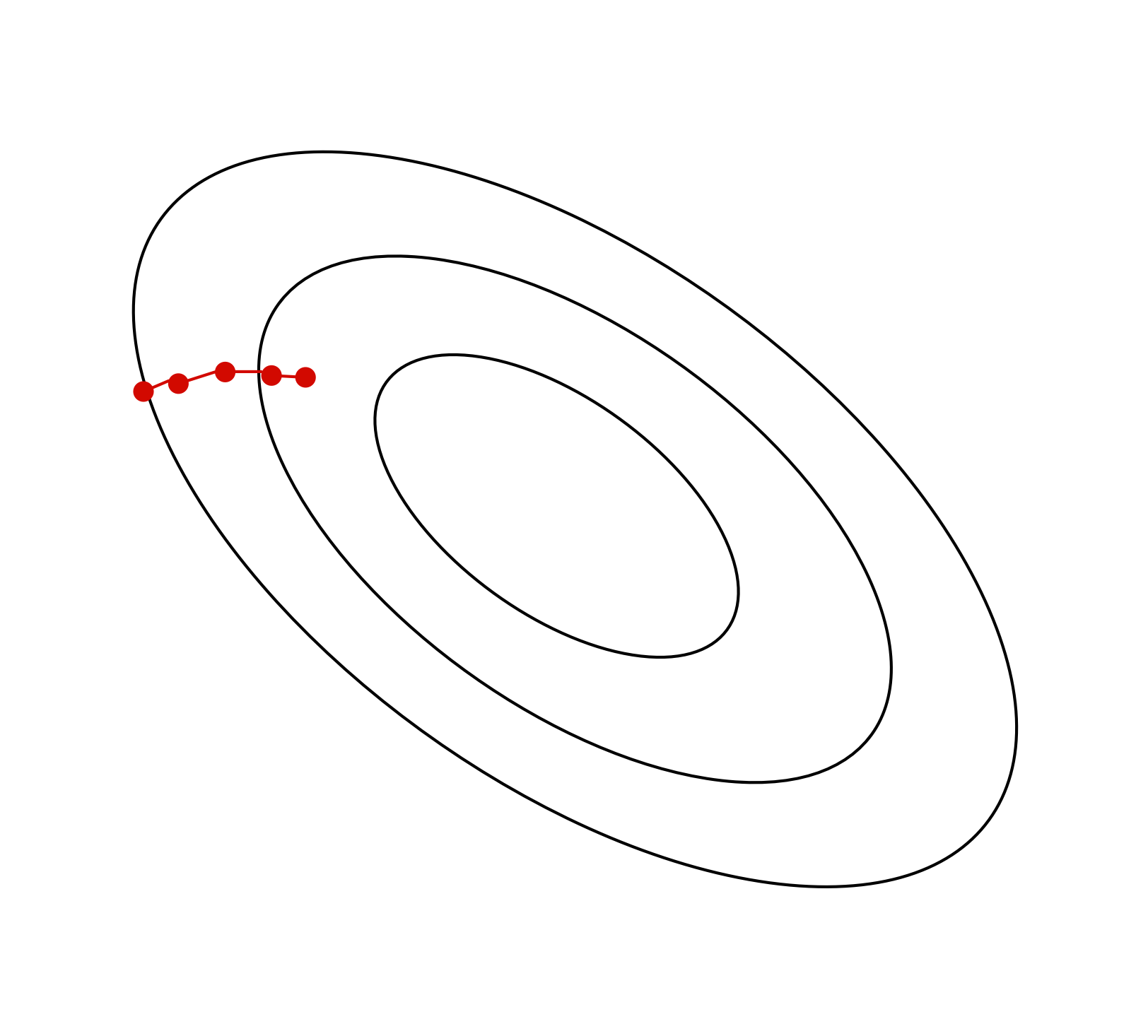
\(\alpha\) too small:
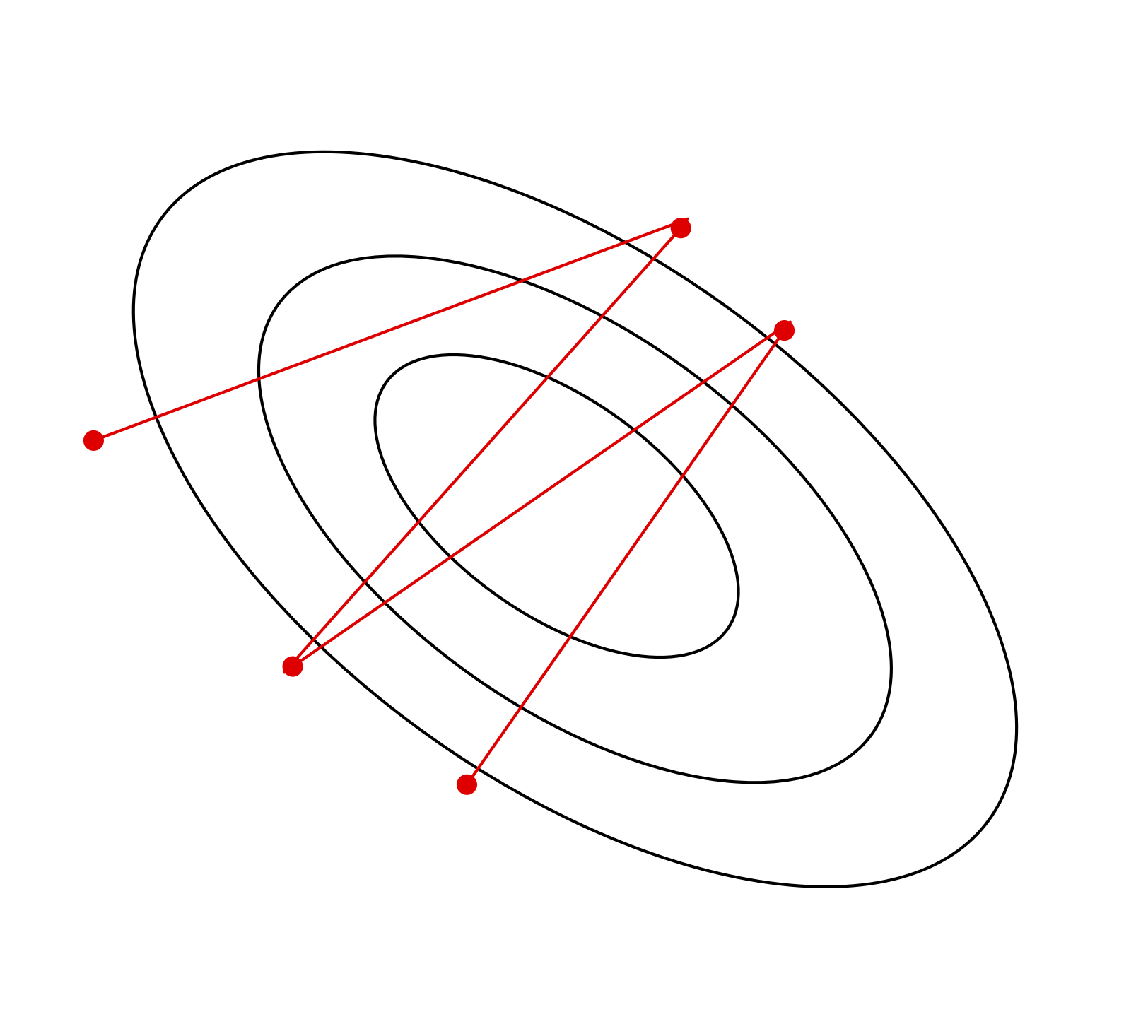
\(\alpha\) too large:
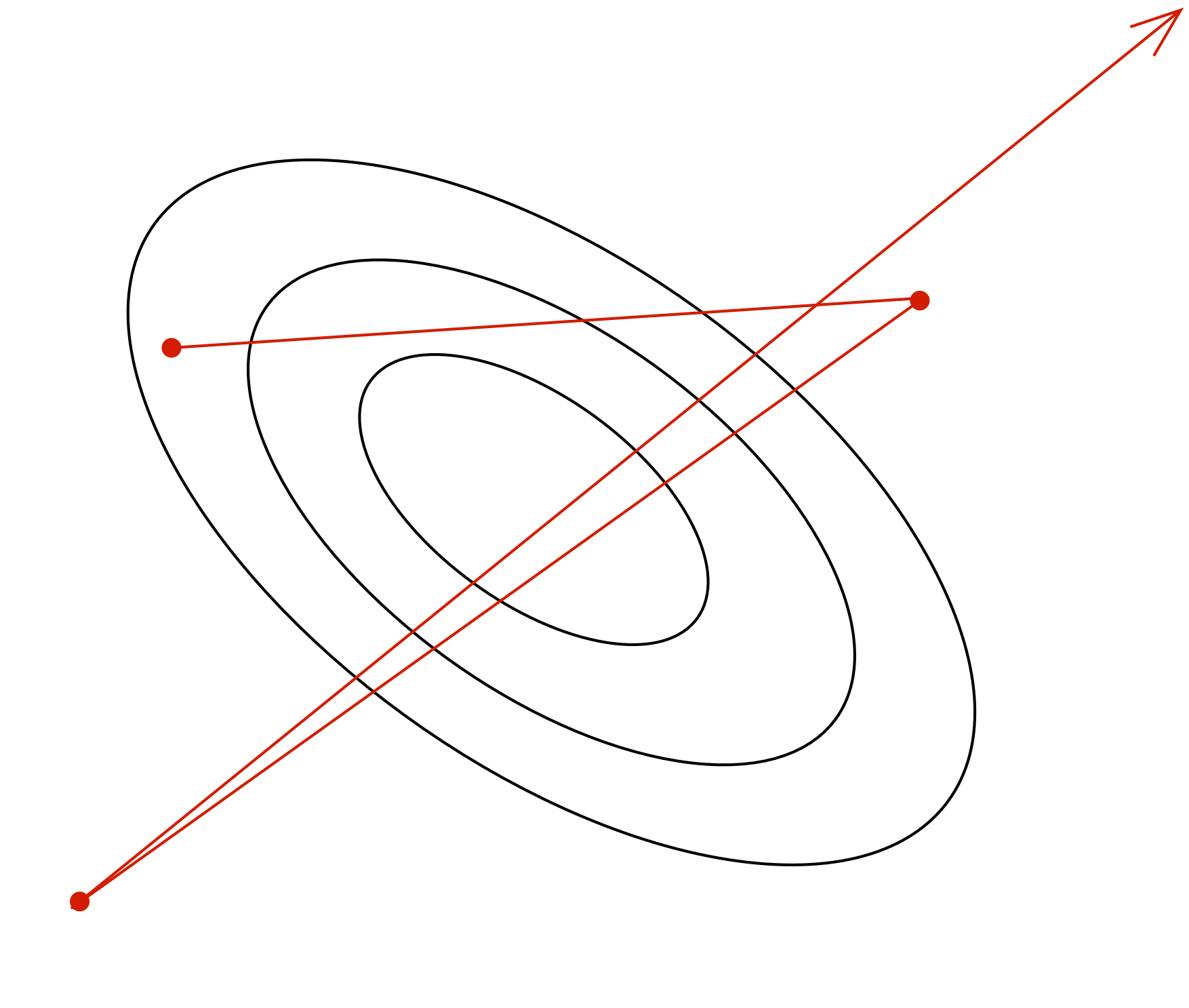
\(\alpha\) much too large:
slow progress
oscillations
instability
Stochastic Gradient Descent
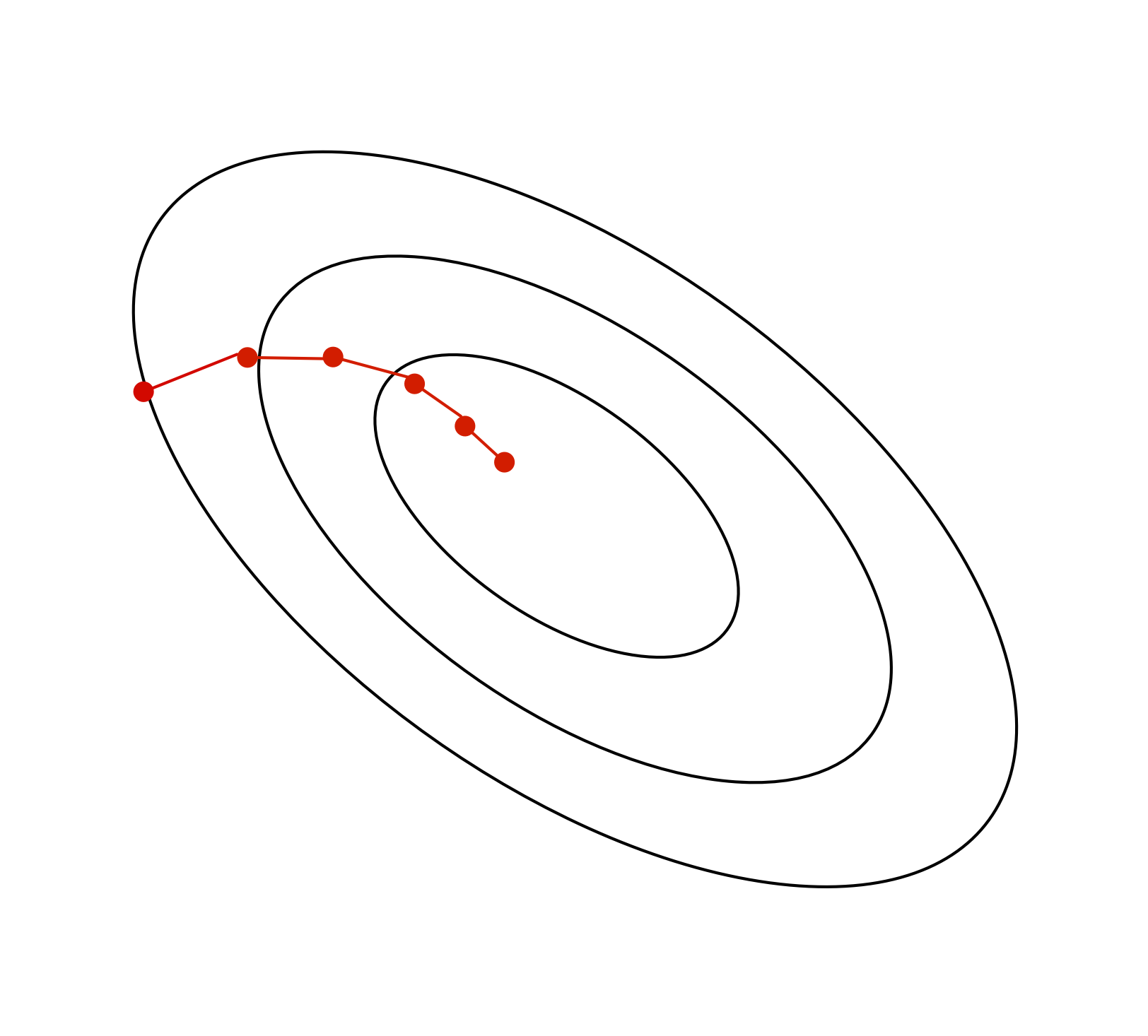
Batch gradient descent moves directly downhill. SGD takes steps in a noisy direction, but moves downhill on average.
batch gradient descent:
stochastic gradient descent:
SGD Learning Rate
In stochastic training, the learning rate also influences the fluctuations due to the stochasticity of the gradients.
Use a large learning rate early in training so you can get close to the optimum
Gradually decay the learning rate to reduce the fluctuations
Larger batch size implies smaller variance, but at what cost?
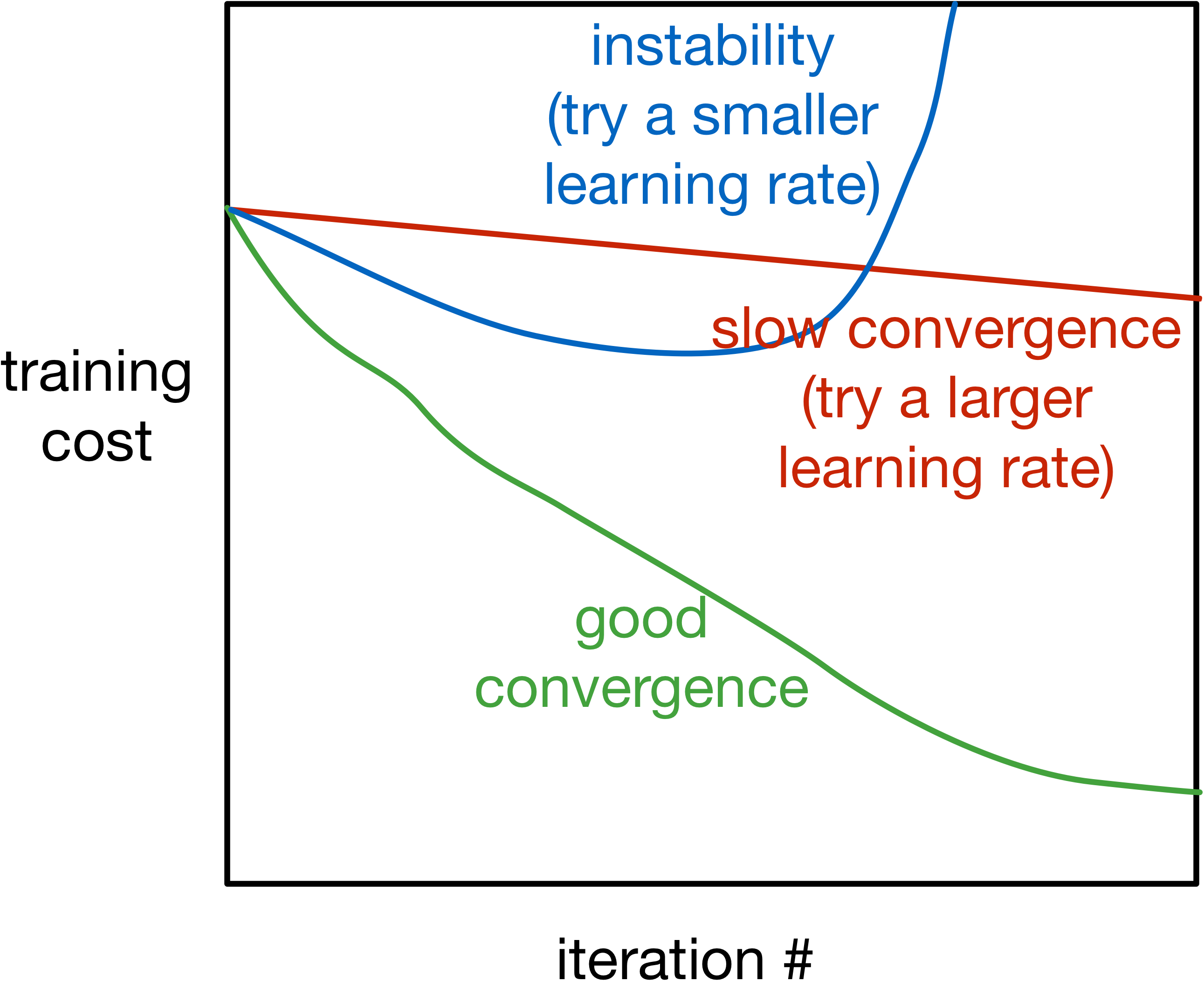
Training Curve (or Learning Curve)
To diagnose optimization problems, it’s useful to look at learning curves: plot the training cost (or other metrics) as a function of iteration.
Note: it’s very hard to tell from the training curves whether an optimizer has converged. They can reveal major problems, but they can’t guarantee convergence.
How do we choose between different neural network models?
For example, different number of hidden units, hidden layers, …?
How do we know how well a model will perform on new data?
The Training Set
The training set is used
to determine the value of the parameters
The model’s prediction accuracy over the training set is called the training accuracy.
The Training Set (cont’d)
Q: Can we use the training accuracy to estimate how well a model will perform on new data?
No! It is possible for a model to fit well to the training set, but fail to generalize
We want to know how well the model performs on new data that we didn’t already use to optimize the model
Poor Generalization
Overfitting and Underfitting
Underfitting:
The model is simple and doesn’t fit the data
The model does not capture discriminative features of the data
Overfitting:
The model is too complex and does not generalize
The model captures information about patterns in training set that happened by chance
Overfitting and Underfitting (cont’d)
Overfitting:
The model is too complex and does not generalize
The model captures information about patterns in training set that happened by chance
e.g. Ringo happens to be always wearing a red shirt in the training set
Model learns: high red pixel content => predict Ringo
The Test Set
We set aside a test set of labelled examples.
The model’s prediction accuracy over the test set is called the test accuracy.
The purpose of the test set is to give us a good estimate of how well a model will perform on new data.
Q: In general, will the test accuracy be higher or lower than the training accuracy?
Model Choices
But what about decisions like:
How many layers?
How many units in each layer?
What non-linear activation to use?
Model Choices (cont’d)
Q: Why can’t we use the test set to determine which model we should deploy?
If we use the test set to make modeling decisions, then we will overestimate how well our model will perform on new data!
We are “cheating” by “looking at the test”
The Validation set
We therefore need a third set of labeled data called the validation set
The model’s prediction accuracy over the validation set is called the validation accuracy.
This dataset is used to:
Make decisions about models that is not continuous and can’t be optimized via gradient descent
Example: choose \(k\), choose which features \(x_j\) to use, choose \(\alpha\), …
The Validation set (cont’d)
The model’s prediction accuracy over the validation set is called the validation accuracy.
This dataset is used to:
Make decisions about models that is not continuous and can’t be optimized via gradient descent
Example: choose \(k\), choose which features \(x_j\) to use, choose \(\alpha\), …
These model settings are called hyperparameters
The validation set is used to optimize hyperparameters
Splitting the data set
Example split:
60% Training
20% Validation
20% Test
The actual split depends on the amount of data that you have.
If you have more data, you can get a way with a smaller % validation and set.
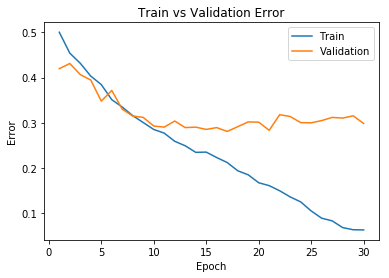
Detecting Overfitting
Learning curve:
x-axis: epochs or iterations
y-axis: cost, error, or accuracy
Q: In which epochs is the model overfitting? Underfitting?
Q: Why don’t we plot the test accuracy plot?
Strategies to Prevent Overfitting
Data Augmentation
Reducing the number of parameters
Weight decay
Early stopping
Ensembles
Stochastic regularization (e.g. dropout)
Data Augmentation
The best way to improve generalization is to collect more data!
But if we already have all the data we’re willing to collect. We can augment the training data by transforming the examples. This is called data augmentation.
Data Augmentation (cont’d)
Example (for images, but depends on task):
translation
horizontal or vertical flip
rotation
smooth warping
noise (e.g. flip random pixels)
We should only warp the training examples, not the validation or test examples (why?)
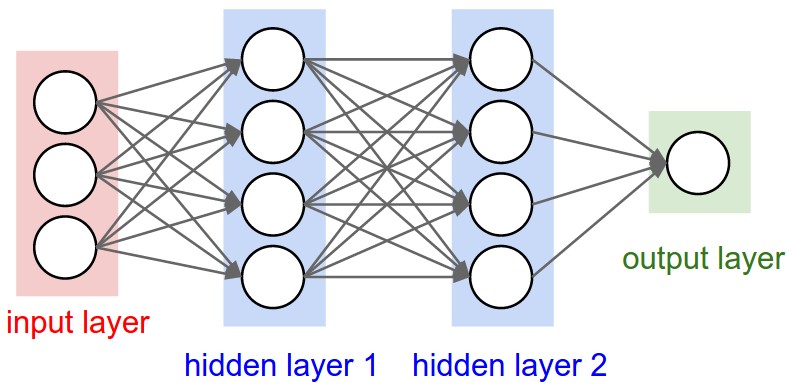
Reducing the Number of Parameters
Networks with fewer trainable parameters are less likely to overfit. We can reduce the number of layers, or the number of parameters per layer.
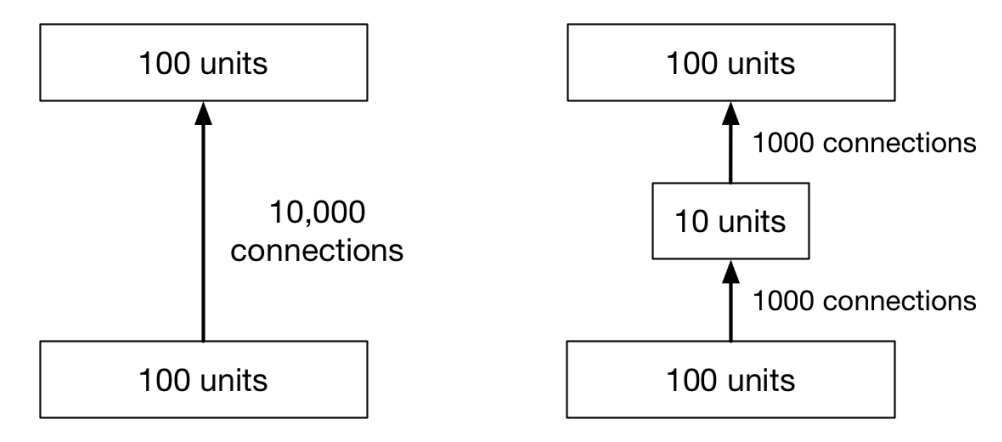
Adding a bottleneck layer is another way to reduce the number of parameters
Reducing the Number of Parameters (cont’d)
Adding a bottleneck layer is another way to reduce the number of parameters
In practise, this isn’t a great idea.
Weight Decay Idea
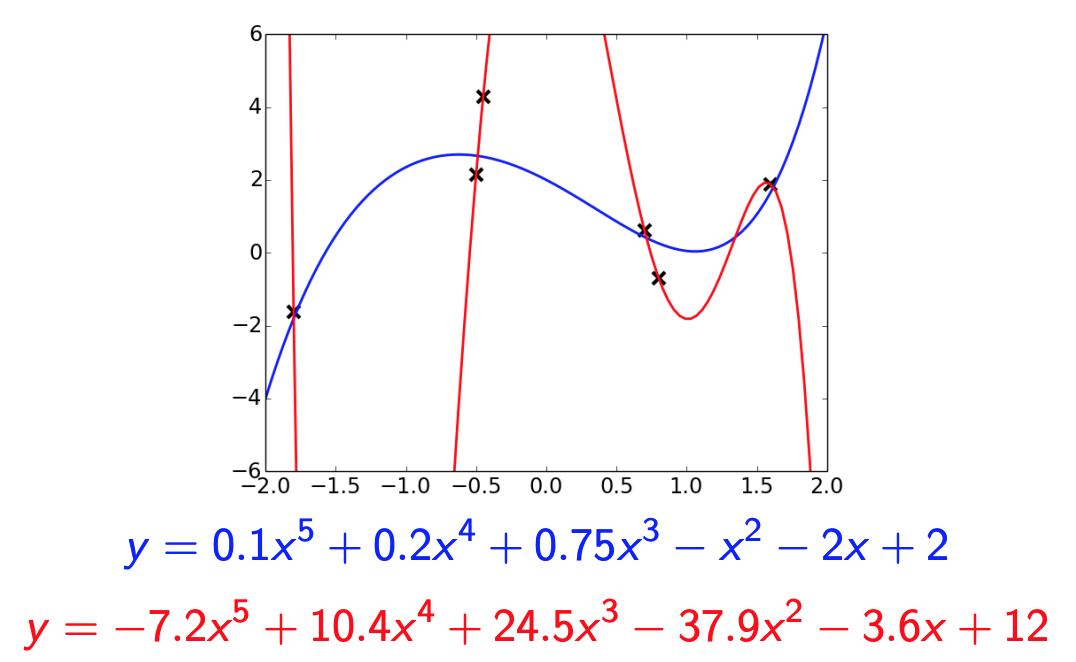
Idea: Penalize large weights, by adding a term (e.g. \(\sum_k w_k ^ 2\)) to the cost function
Q: Why is it not ideal to have large (absolute value) weights?
Because large weights mean that the prediction relies a lot on the content of one feature (e.g. one pixel)
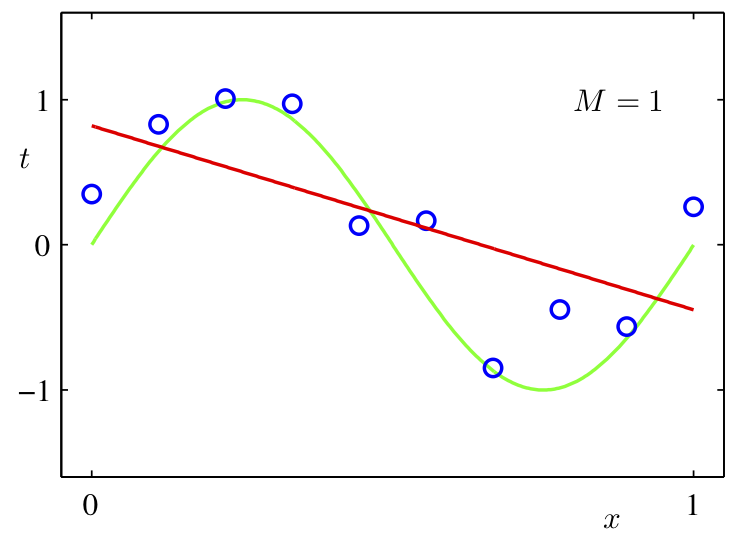
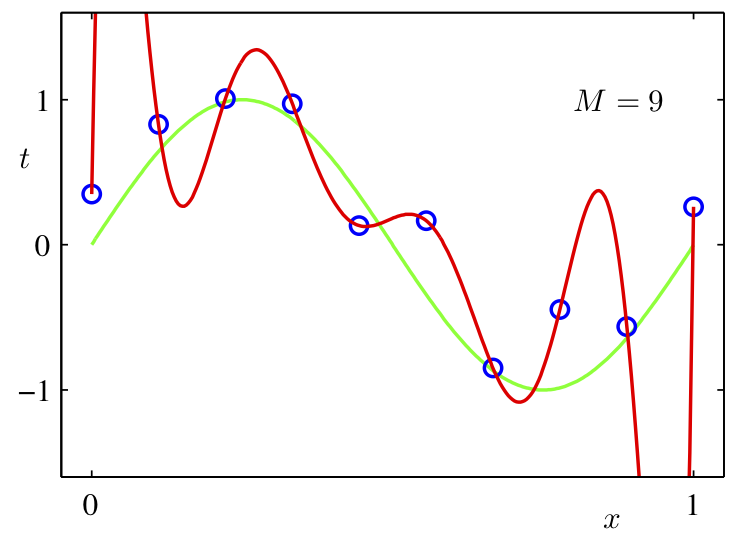
Small vs Large Weights
The red polynomial overfits. Notice it has really large coefficients
Weight Decay
\(L^1\) regularization: add a term \(\sum_{j=1}^D |w_j|\) to the cost function
Mathematically, this term encourages weights to be exactly 0
\(L^2\) regularization: add a term \(\sum_{j=1}^D w_j^2\) to the cost function
Mathematically, in each iteration the weight is pushed towards 0
Combination of \(L^1\) and \(L^2\) regularization: add a term \(\sum_{j=1}^D |w_j| + w_j^2\) to the cost function
Idea: Stop training when the validation error starts going up.
In practice, this is implemented by checkpointing (saving) the neural network weights every few iterations/epochs during training.
We choose the checkpoint with the best validation error to actually use. (And if there is a tie, use the earlier checkpoint)
Why does early stopping work?
Weights start off small, so it takes time for them to grow large.
Therefore, stopping early has a similar effect to weight decay.
If you’re using sigmoid units, and the weights start out small, then the inputs to the activation functions take only a small range of values.
The neural network starts out approximately linear, and gradually becomes non-linear (and thus more powerful)
Ensembles
If a loss function is convex (with respect to the predictions), you have a bunch of predictions for an input, and you don’t know which one is best, you are always better off averaging them!
for \(\lambda_i \ge 0\) and \(\sum_i \lambda_i = 1\)
Idea: Build multiple candidate models, and average the predictions on the test data.
This set of models is called an ensemble.
Examples of Ensembles
Train neural networks starting from different random initialization (might not give enough diversity)
Train different network on different subset of the training data (called bagging)
Train networks with different architectures, hyperparameters, or use other machine learning models
Ensembles can improve generalization substantially.
However, ensembles are expensive.
Stochastic Regularization
For a network to overfit, its computations need to be really precise. This suggests regularizing them by injecting noise into the computations, a strategy known as stochastic regularization.
One example is dropout: in each training iteration, random choose a portion of activations to set to 0.
Stochastic Regularization (cont’d)
The probability \(p\) that an activation is set to 0 is a hyperparameter.
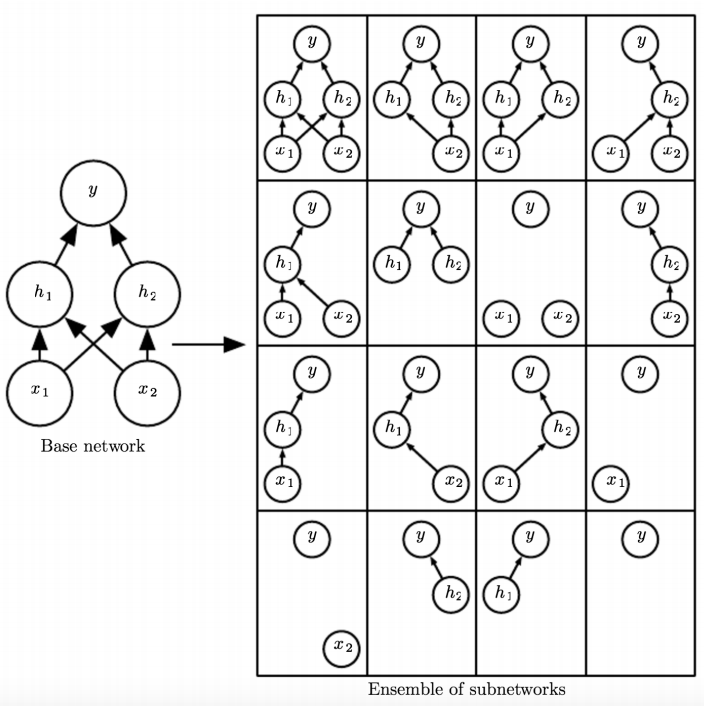
Dropout
Dropout can be seen as training an ensemble of 2D different architectures with shared weights (where D is the number of units)
Dropout at Test Time
Don’t do dropout at test time (why not?)
Multiply the weights by \(1-p\) (why?)
Since the weights are on \(1-p\) fraction of the time, multiplying the weights by \(1-p\) matches the expected value of the activation magnitude (e.g. going into the next layer).
Summary of “Bag of Tricks”
Data Augmentation
Reducing the number of parameters
Weight decay
Early stopping
Ensembles
Stochastic regularization (e.g. dropout)
Diagnosing issues using learning curves
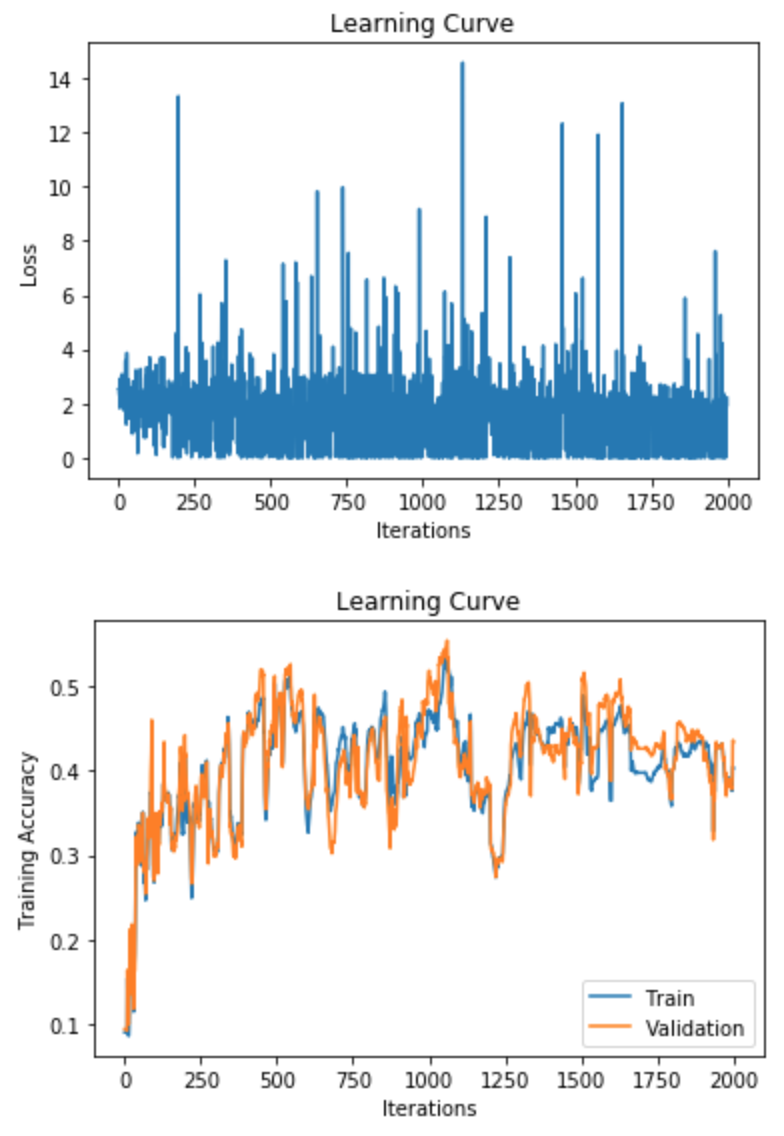
Why does the training curve to look like this?
The learning rate is too high
The learning rate is too low
The number of iterations is too low
The weights are all initialized to zero
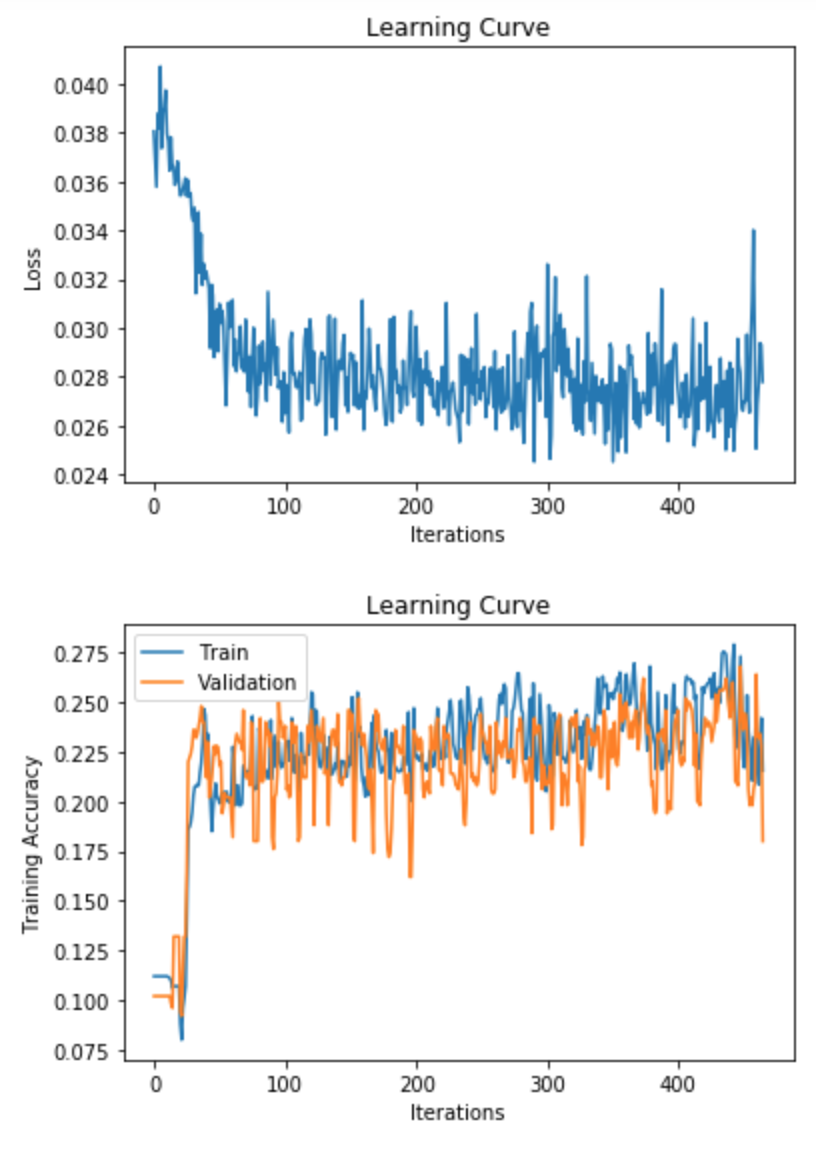
Why does the training curve to look like this?
The batch size is too small
Batch normalization was used
The number of parameters is too large
The learning rate is too small
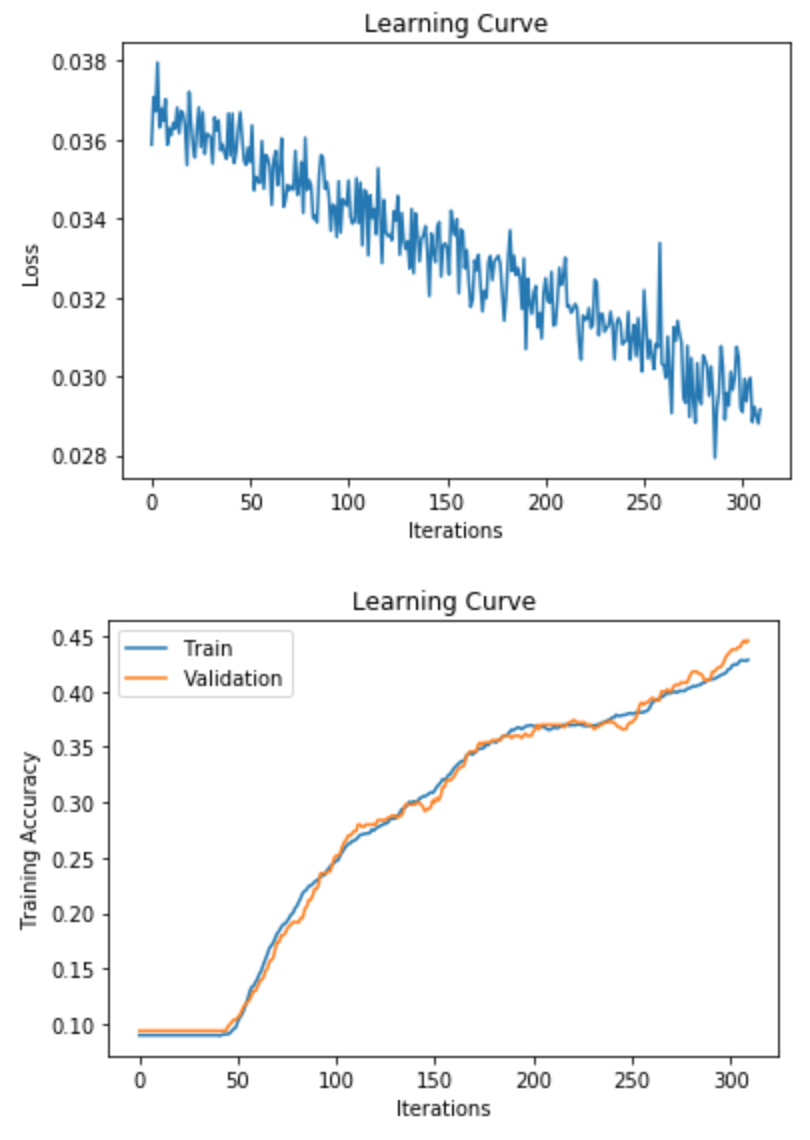
Why does the training curve to look like this?
The network probably has too few parameters
The network probably has too many parameters
The learning rate is probably too small
If weight decay is used, the lambda parameter is probably too large.
Either (1) or (4) could be true
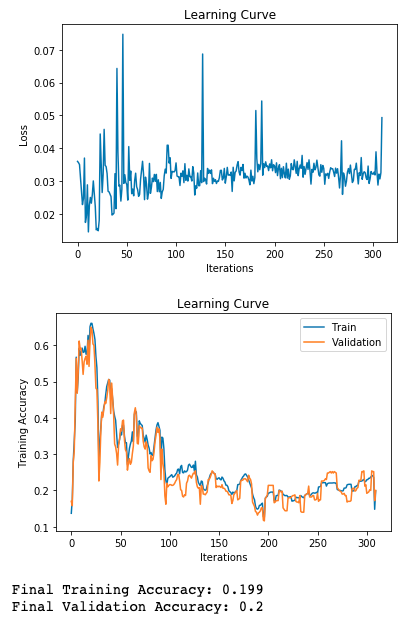
Why does the training curve to look like this?
Evidence of overfitting
Evidence of underfitting
Too much momentum
The weights were all initialized to 0
Bias-Variance Tradeoff
Expected Test Error for Regression
Training set \(D = \{(x_1, y_1), ..., (x_n, y_n)\}\) drawn i.i.d. from distribution \(P(X,Y)\). Let’s write this as \(D \sim P^n\).
Assume for simplicity this is a regression problem with \(y \in \mathbb{R}\) and \(L_2\) loss.
What is the expected test error for a function \(h_D(x)=y\) trained on the training set \(D \sim P^n\), assuming a learning algorithm \(\mathcal{A}\)? It is:
The expectation is taken with respect to possible training sets \(D \sim P^n\) and the test distribution P. Let’s write the expectation as \(\mathbb{E}_{D,x,y}\) for notational simplicity.
Note that this is the expected test error not the empirical test error that we report after training. How are they different?
Decomposing the Expected Test Error
Let’s start by adding and subtracting the same quantity \[\begin{align*}
\mathbb{E}_{D,x,y} \left[ \left(h_D(x) - y\right)^2 \right] = \mathbb{E}_{D,x,y} \left[ \left(h_D(x) - \hat{h}(x) + \hat{h}(x) - y\right)^2 \right]
\end{align*}\]
\(\hat{h}(x) = \mathbb{E}_{D \sim P^n}[h_D(x)]\) is the expected regressor over possible training sets, given the learning algorithm \(\mathcal{A}\).
\(\hat{y}(x) = \mathbb{E}_{y|x}[y]\) is the expected label given \(x\). Labels might not be deterministic given x.
Decomposing the Expected Test Error
After some algebraic manipulation (proof), we can show that:
Variance: Captures how much your regressor \(h_D\) changes if you train on a different training set. How “over-specialized” is your regressor \(h_D\) to a particular training set \(D\)? I.e. how much does it overfit? If we have the best possible model for our training data, how far off are we from the average regressor \(\hat{h}\)?
Bias: What is the inherent error that you obtain from your regressor \(h_D\) even with infinite training data? This is due to your model being “biased” to a particular kind of solution (e.g. linear model). In other words, bias is inherent to your model/architecture.
… and Noise
Noise: How big is the data-intrinsic noise? This error measures ambiguity due to your data distribution and feature representation. You can never beat this, it is an aspect of the physical data generation process, over which you have no control. You cannot improve this with more training data. It is sometimes called “aleatoric uncertainty”.
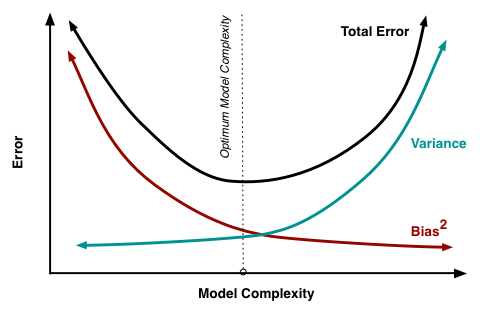
The Bias-Variance Tradeoff
If you use a high-capacity model, you will get low bias, but the variance over different training sets will be high.
If you use a low-capacity model, you will get high bias, but the variance over different training sets will be low.
There is a sweet spot that trades off between the two.